一种在垂直面内能旋转180度的液压驱动机构的制作方法
1.本技术属于液压驱动的旋转机构领域,具体为一种在垂直面内能旋转180度的液压驱动机构。
背景技术:
2.在工业制造领域由于制造工艺的要求往往需要将设备或加工件翻转180度,一般翻转机构多采用电动机驱动减速器带动的齿轮副机构或者链条链轮机构。但当回传直径增大时,沿回转体圆周上的齿轮的加工难度也不断增大,而回转负荷增大时相应的停止刹车机构也变得十分庞大,链条链轮驱动机构也是如此。现有技术也有采用电动机驱动减速器在回转中心带动的齿轮副机构,虽然驱动齿轮副尺寸减小,但减速机构复杂。若采用旋转液压马达或者带齿条的油缸作为驱动,则驱动功率会受液压马达功率和齿轮副传递功率的限制很难做大。虽然两个l型下拉翻转机串联后通过两个90度间隙旋转实现工件180度旋转,但其通用性不强。
技术实现要素:
3.本发明所要解决的技术问题是提供一种机构简明、安全、自动化程度高、能自动平衡旋转体重心、维护方便的可180度翻转的液压驱动机构。
4.为了解决以上技术问题,本发明提供一种在垂直面内能旋转180度的液压驱动机构,包括基座、液压缸ⅰ和液压缸ⅱ、转动臂ⅰ和转动臂ⅱ、转轴和液压系统;所述液压缸ⅰ和液压缸ⅱ为两只同尺寸的液压缸,所述液压缸ⅰ和液压缸ⅱ的活塞杆ⅰ和活塞杆ⅱ分别与转动臂ⅰ和转动臂ⅱ销轴连接,所述液压缸ⅰ和液压缸ⅱ的缸体尾部分别与基座销轴连接;转动臂ⅰ和转动臂ⅱ通过键与转轴连接。液压缸在液压系统产生的液压油驱动下通过两只转动臂带动转轴旋转。
5.进一步的,转动臂ⅰ和活塞杆ⅰ通过铰点ⅰ销轴连接,转动臂ⅱ和活塞杆ⅱ通过铰点ⅱ销轴连接,两活塞杆分别在液压缸ⅰ和液压缸ⅱ内做直线运动并绕转动臂上的铰点ⅰ和铰点ⅱ转动使转轴完成180度旋转。
6.进一步的,转动臂ⅰ和转动臂ⅱ为整体结构,中间设置配有键槽的轴孔。
7.进一步的,轴孔中穿设具有键槽的转轴,两者通过键连接;转动臂ⅰ和转动臂ⅱ通过键带动转轴旋转,转轴带动机构作180度旋转。
8.进一步的,轴孔中穿设具有键槽的转轴,两者通过键连接。
9.进一步的,液压缸ⅰ和液压缸ⅱ的缸体尾部分别通过铰点ⅲ、铰点ⅳ与基座销轴连接。
10.进一步的,在驱动机构旋转180度过程中,待旋转工件与驱动机构的综合重心x从x到n,为重力阻力矩,重心x从n到y,为重力超越力矩;重力阻力矩、重力超越力矩分别由液压油缸ⅰ2和液压缸ⅱ3上的双向平衡阀ⅰ15、ⅱ16控制。
11.本发明相对于现有技术,具有如下有益效果:
1.本发明液压缸ⅰ和液压缸ⅱ的活塞杆端部分别与转动臂ⅰ和转动臂ⅱ销轴连接,液压缸ⅰ和液压缸ⅱ的缸体尾部分别与基座销轴连接;转动臂ⅰ和转动臂ⅱ通过键与转轴连接;液压缸在液压系统产生的液压油驱动下通过转动臂ⅰ和转动臂ⅱ带动转轴旋转,结构简明、安全、自动化程度高、能自动平衡旋转体重心、维护方便。
12.2.本发明液压缸ⅰ和液压缸ⅱ的缸体尾部分别通过铰点ⅲ、铰点ⅳ与基座销轴连接,便于液压缸推动转动臂进行180度旋转。
13.3.本发明的待旋转的工件重心和旋转机构的重心形成的综合重心x在180度顺时针旋转工程中,从x到n为重力阻力矩,从n到y为重力超越力矩。在力矩转换过程中由液压油缸上的双向平衡阀控制。通过两个双向液压平衡阀,实现机构能安全可靠地停止在任意位置,并能自动适应待旋转工件与驱动机构的综合重心在机构回转中心o的一定范围内的上方、下方、左方、右方变化。
附图说明
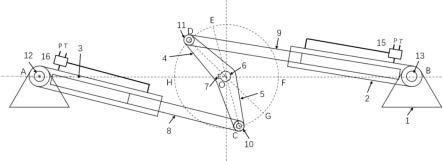
14.图1为本发明的原理图。
15.图2为转动臂ⅰ和转动臂ⅱ的主视图。
16.图3为本发明液压缸ⅱ通过止点h位置。
17.图4为本发明液压缸ⅰ通过止点f位置。
18.图5为本发明翻转180度后的停止位置。
19.图6为本发明图4的俯视图。
20.图7为本发明翻转180度过程中的重心x旋转轨迹图中,1.基座,2.液压缸ⅰ,3.液压缸ⅱ,4.转动臂ⅰ,5.转动臂ⅱ,6.转轴,7.键,8.活塞杆ⅱ,9.活塞杆ⅰ,10.铰点ⅱ,11.铰点ⅰ,12.铰点ⅳ,13.铰点ⅲ,14.轴孔,15.双向液压平衡阀ⅰ,16.双向液压平衡阀ⅱ。
具体实施方式
21.如图1、2所示,一种在垂直面内能旋转180度的液压驱动机构的原理图,此时机构在起始点,该机构包括基座1、液压缸ⅰ2和液压缸ⅱ3、转动臂ⅰ4和转动臂ⅱ5、旋转轴6、键7和液压系统。液压缸ⅰ2和液压缸ⅱ3为两只同尺寸的液压缸。液压缸ⅰ2和液压缸ⅱ3的活塞杆端部分别与转动臂ⅰ4和转动臂ⅱ5销轴连接,液压缸ⅰ2和液压缸ⅱ3的缸体尾部分别通过铰点ⅲ13、铰点ⅳ12与基座1销轴连接。转动臂ⅰ4和转动臂ⅱ5通过键7与转轴6连接。机构的动力由液压系统提供,采用定量柱塞泵、三位四通换向阀,两个液压缸上分别连接有双向平衡阀,通过变频驱动改变柱塞泵的转速以改变柱塞泵的排量从而控制旋转机构转速。液压缸在液压系统产生的液压油驱动下通过两只转动臂带动机构的转轴6旋转,机构只能朝一个方向及顺时针方向转动并逆时针原路返回。由于需要旋转180度,两只液压缸必须在旋转过程中不同时经过各自的止点h和f,同时在其中一个液压缸换向时,另一只液压缸必须承担全部的转动负荷。两只液压缸同时运行过程中通过转动机构的刚性链接获得负荷自平衡。
22.如图2所示,转动臂ⅰ4和转动臂ⅱ5为整体结构,中间设置具有键槽的轴孔14。轴孔14中穿设具有键槽的转轴6,两者通过键7连接;转动臂ⅰ4和转动臂ⅱ5通过键7带动转轴6旋
转,转轴6带动机构作180度旋转。转动臂ⅱ5和活塞杆ⅱ8通过铰点ⅱ10销轴连接,转动臂ⅰ4和活塞杆ⅰ9通过铰点ⅰ11销轴连接,两活塞杆分别在液压缸ⅰ2和液压缸ⅱ3内做直线运动并绕转动臂上的铰点ⅰ11和铰点ⅱ10转动,使转轴6完成180度旋转。
23.工作过程如下:初始时如图1,机构处于水平状态,启动旋转时,液压缸ⅰ2、液压缸ⅱ3从有杆腔进油,无杆腔出油,两液压缸的活塞杆同时收缩,使得转动臂ⅰ4和转动臂ⅱ5在活塞杆ⅰ9和活塞杆ⅱ8的拉动下按顺时针方向转动。
24.如图3,在液压缸ⅰ2和液压缸ⅱ3共同作用下转动臂ⅱ5转到h位置时,液压缸ⅱ3的活塞杆ⅱ8达到缩进止点。此时机构旋转中心o,转动臂与活塞杆的铰接中心ⅱ10,液压缸的摆动中心ⅳ12位于三点连线上。通过换向阀进行换向,换向后液压缸ⅰ2的活塞杆ⅰ9继续收缩,液压缸ⅱ3的活塞杆ⅱ8由收缩换向为伸出,液压油从无杆腔进油,有杆腔出油。
25.如图4和6,在液压缸ⅰ2和液压缸ⅱ3共同作用下转动臂ⅰ4转到f位置时,液压缸ⅰ2活塞杆达到缩进止点,通过换向阀进行换向,换向后液压缸ⅰ2的活塞杆9换为伸出,液压缸ⅱ3的活塞杆8继续伸出。
26.如图5,在液压缸ⅰ2和液压缸ⅱ3共同作用下转动臂ⅰ4和转动臂ⅱ5继续顺势针转动到g和e点,完成机构180度旋转,临时固定在机构上的工件随之完成180度旋转。
27.旋转机构完成180度翻转后,启动反转按钮,旋转机构在液压缸ⅰ2和液压缸ⅱ3的作用下完成逆时针转动。
28.如图7,在驱动机构旋转180度过程中,待旋转工件与驱动机构的综合重心x从x到n,为重力阻力矩,重心x从n到y,为重力超越力矩。在重力矩转换过程中,重力阻力矩、重力超越力矩分别由液压油缸ⅰ2和液压缸ⅱ3上的双向平衡阀ⅰ15、ⅱ16自动控制。
29.通过安装在液压缸ⅰ2和液压缸ⅱ3上的双向液压平衡阀ⅰ15和双向平衡阀ⅱ16,实现机构能安全可靠地停止在任意位置,并能自动适应待旋转工件与驱动机构的综合重心在机构回转中心o的一定范围内的上方、下方、左方、右方变化。
30.当多个旋转机构并联运行时,需要在同步控制系统下运行。同步系统由安装在每个旋转机构的旋转编码器作为旋转机构的角速度传感器,通过plc控制器和上位机的反馈控制实现同步控制。
31.以上实施例不以任何形式限制本发明,凡采用等同替换或者等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种可调节平面位置的支承座的...
- 一种N通结构件的制作方法
- 一种Y形高温高压锻制三通的制...
- 一种职业教育产教对接知识图谱...
- 一种六花防粘焊接螺栓的制作方...
- 一种给排水工程用管道养护定位...
- 一种用于云计算终端的辅助防护...
- 一种高压金属波纹管机械密封件...
- 一种单管可调节电视支架的制作...
- 一种高粘度液体分配器的制作方...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1