吊具工装、吊装方法以及生产线与流程
1.本申请涉及建筑施工技术领域,具体而言,涉及一种吊具工装、吊装方法以及生产线。
背景技术:
2.在装配式工厂生产中,对生产节拍、生产效率都有一定的要求,预埋有钢筋的预制构件的吊装在整个pc构件生产中起到必不可少、至关重要的一环。目前,无论在建筑现浇加工现场还是pc装配式工厂生产线中,通常使用行车和吊具结合的吊装形式来流转预埋有钢筋的构件,例如叠合楼板、烟台、飘窗板以及厨房构件等等。然而,考虑到上述预制构件的体积较大,且表面形状不够平整等因素,现有的吊具工装仍然需要多个工作人员一起协同操作来完成上述预制构件的装配作业。吊装过程中,工人需要爬到预制构件上将吊具工装的吊钩挂到预制构件上,不仅吊装效率低,且操作具有一定危险性。
技术实现要素:
3.为此,本申请提出一种吊具工装、吊装方法以及生产线,能够快速装卸预制构件等工件,需要较少的工人辅助作业,不仅转运效率高,且操作简单方便,吊装平稳安全。
4.本申请的一些实施例提出一种吊具工装,包括:吊装主梁,所述吊装主梁可沿着左右方向相对于水平面倾斜设置;两个挂钩机构,每一挂钩机构均连接于所述吊装主梁下方且沿着左右方向相对间隔设置,至少一挂钩机构沿着左右方向相对于所述吊装主梁可滑动设置;张拉机构,所述张拉机构设于所述吊装主梁的上方,其包括一张拉主体和自所述张拉主体沿着左右两侧向下延伸的第一张拉线和第二张拉线,所述第一张拉线向左下延伸至连接所述吊装主梁的左侧,所述第二张拉线向右下延伸至所述吊装主梁的右侧;所述吊装主梁沿着左右方向倾斜设置时,所述张拉主体张紧所述第一张拉线和所述第二张拉线。
5.相对于现有的吊具工装,使用本申请实施例中的吊具工装能够快速装卸预制构件,需要较少的工人辅助作业,不仅转运效率高,且操作简单方便,吊装平稳安全。
6.另外,根据本申请实施例的吊具工装还具有如下附加的技术特征:
7.根据本申请的一些实施例,当所述吊装主梁处于原始平衡状态时,所述第一张拉线和所述第二张拉线的长度相等,定义其为原始长度;当所述吊装主梁朝向左侧倾斜时,所述第一张拉线的长度相对所述原始长度增加,定义其为第一伸出长度,所述第二张拉线的长度相对所述相对所述原始长度减小,定义其为第一缩减长度,所述张拉主体张紧所述第一伸出长度的所述第一张拉线以及张紧所述第一缩减长度的所述第二张拉线;当所述吊装主梁朝向右侧倾斜时,所述第一张拉线的长度相对所述原始长度减小,定义其为第二缩减长度,所述第二张拉线的长度相对于所述原始长度增加,定义其为第二增加长度,所述张拉主体张紧所述第二缩减长度的所述第一张拉线以及张紧所述第二增加长度的所述第二张拉线。
8.根据本申请的一些实施例,所述吊装主梁朝向左侧倾斜至于第一安装位置时,处
于第一安装位置时的左侧的所述挂钩机构可连接工件的左侧吊点;所述吊装主梁朝向右侧倾斜至第二安装位置时,所述第二安装位置的右侧的所述挂钩可连接工件的右侧吊点。
9.根据本申请的一些实施例,所述挂钩机构包括横梁和至少一个钩挂组件,所述横梁连接于所述吊装主梁且与所述吊装主梁垂直设置,所述钩挂组件沿所述横梁的长度方向位置可调节地安装于所述横梁,使两个挂钩机构的间距可调节,以抓取或松开预制构件。
10.根据本申请的一些实施例,所述钩挂组件包括:导向框架,沿所述横梁的长度方向与所述横梁滑动配合;第二止动件,所述第二止动件旋入所述导向框架并抵接于所述横梁,以固定所述导向框架相对于所述横梁的位置;挂钩,固定于所述导向框架的下侧。该种形式的钩挂组件构造简单,成本低廉,且易于实现在横梁的长度方向上的位置的调节。
11.根据本申请的一些实施例,所述两个挂钩机构包括第一挂钩机构和第二挂钩机构,所述第一挂钩机构的横梁固定于所述吊装主梁,所述第二挂钩机构的横梁可移动地连接于所述吊装主梁。该种形式的夹爪组件构造简单,易于操作,制造成本低廉,且第一挂钩机构与吊装主梁固定为一体,使吊具工装能够吊运较大重量的预制构件。
12.根据本申请的一些实施例,所述第二挂钩机构的横梁设有把手,以便于工人手持调节第二挂钩机构在吊装主梁上的位置。
13.根据本申请的一些实施例,所述第二挂钩机构还包括第一止动件,所述第一止动件用于固定所述第二挂钩机构的横梁与所述吊装主梁的相对位置。
14.根据本申请的一些实施例,所述两个挂钩机构的横梁均可移动地连接于所述吊装主梁。该种形式的夹爪组件中,两个挂钩机构均可移动,可从预制构件的两侧同时抓取或松开预制构件,使吊具工装的竖向升降路径与抓取预制构件后吊具工装的中心线重合,缓解起吊过程中工件300的晃动,从而实现平稳起吊。
15.根据本申请的一些实施例,所述挂钩机构包括直线驱动机构,安装于所述吊装主梁,能够驱动所述挂钩机构的横梁移动,使挂钩机构以自动化的形式相对于吊装主梁移动。
16.本申请的一些实施例还提出一种工件吊装方法,使用上述的吊具工装,工件吊装方法包括:所述张紧第一张拉线和第二张拉线;吊装主梁能够朝向左侧倾斜至第一安装位置,使位于左侧的挂钩机构降至第一安装位置并连接工件的左侧吊点;吊装主梁再朝向右侧倾斜至第二安装位置,使位于右侧的挂钩机构降至预设高度;两个挂钩机构相互靠近以使位于右侧的挂钩机构连接工件的右侧吊点。
17.通过上述工件吊装方法,能够快速装卸预制构件,需要较少的工人辅助作业,不仅转运效率高,且操作简单方便,吊装平稳安全。
18.本申请的一些实施例还提出一种预制构件生产线,包括:移送机构;上述的吊具工装,所述吊具工装的张拉机构悬吊于所述移送机构的执行端。
19.使用本申请实施例中的工件生产线转运预制构件,能够实现快速装拆作业,且只需要一个工人站立于工人位辅助作业,不仅便于操作,且吊装平稳、安全,降低了人力成本,提高了转运效率。
20.本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
附图说明
21.为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
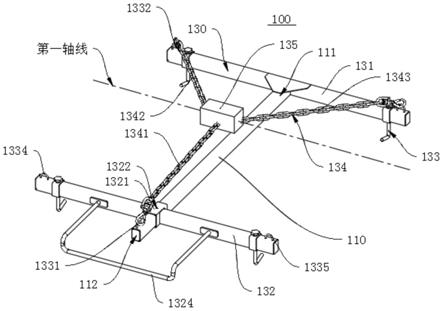
22.图1为本申请实施例提供的吊具工装的结构示意图(夹爪组件为单边活动夹爪组件);
23.图2为本申请实施例提供的吊具工装中第一挂钩机构的结构示意图(夹爪组件为单边活动夹爪组件);
24.图3为图2中a处的局部放大图;
25.图4为本申请实施例提供的吊具工装的一种视角的应用示意图(夹爪组件为单边活动夹爪组件);
26.图5为本申请实施例提供的吊具工装的另一种视角的应用示意图(夹爪组件为单边活动夹爪组件);
27.图6为本申请实施例提供的吊具工装中挂钩的受力分析图;
28.图7为本申请实施例提供的吊具工装的结构示意图(夹爪组件为双边活动夹爪组件);
29.图8为本申请实施例提供的吊具工装的应用示意图(夹爪组件为双边活动夹爪组件);
30.图9为本申请实施例提供的吊具工装中直线驱动机构的结构示意图(夹爪组件为双边活动夹爪组件);
31.图10为本申请实施例提供的工件吊装方法的步骤示意图1;
32.图11为本申请实施例提供的工件吊装方法的步骤示意图2;
33.图12为本申请实施例提供的工件吊装方法的步骤示意图3;
34.图13为本申请实施例提供的吊具工装的张拉主体的原理示意图1;
35.图14为本申请实施例提供的吊具工装的张拉主体的原理示意图2;
36.图15为本申请实施例提供的工件生产线的结构示意图。
37.图标:100
‑
吊具工装;110
‑
吊装主梁;111
‑
主梁第一端;112
‑
主梁第二端;130
‑
单边活动夹爪组件;131
‑
第一挂钩机构;1311
‑
横梁;1312
‑
第一钩挂组件;1313
‑
导向框架;1314
‑
第二止动件;1315
‑
挂钩;1316
‑
第一段;1317
‑
第二段;1318
‑
第二钩挂组件;132
‑
第二挂钩机构;1321
‑
第一滑动框架;1322
‑
第一螺纹孔;1324
‑
把手;133
‑
第一吊耳组件;1331
‑
第一吊耳;1332
‑
第二吊耳;1333
‑
第三吊耳;1334
‑
第四吊耳;1335
‑
第五吊耳;134
‑
第一链条组件;1341
‑
第一链条;1342
‑
第二链条;1343
‑
第三链条;135
‑
悬吊块;140
‑
双边活动夹爪组件;141
‑
第一挂钩机构;1411
‑
直线驱动机构;1412
‑
电机;1413
‑
丝杠;1414
‑
螺母;1415
‑
连接架;1416
‑
导轨组件;1417
‑
轴承座;142
‑
第二挂钩机构;143
‑
第六吊耳;151
‑
张拉主体;152
‑
第一张拉线;153
‑
第二张拉线;200
‑
工件生产线;210
‑
缓存工位;220
‑
起吊工位;230
‑
模台工位;240
‑
移送机构;241
‑
第一直线导轨;242
‑
第二直线导轨;243
‑
悬吊机构;250
‑
屏幕;260
‑
工人位;270
‑
滚轮输送机构;280
‑
操作面板;300
‑
工件;310
‑
第一钩挂部;311
‑
第一子钩挂部;312
‑
第二子钩挂部;320
‑
第二钩挂部;321
‑
第三子钩挂部;322
‑
第四子钩挂部。
具体实施方式
38.为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本申请实施例的组件可以以各种不同的配置来布置和设计。
39.因此,以下对在附图中提供的本申请的实施例的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
40.请参照图4,在本申请的描述中,工件300为预制钢筋桁架,包括第一钩挂部310和第二钩挂部320。其中,第一钩挂部310包括第一子钩挂部311和第二子钩挂部312,第二钩挂部320包括第三子钩挂部321和第四子钩挂部322。第一钩挂部310为工件300的左侧吊点,第二钩挂部320为工件300的右侧吊点。
41.在其他实施例中,工件300也可以为背面暴露有钢筋的叠合板、飘窗板等混凝土钢筋预制板件。
42.请参照图1,本申请实施例的吊具工装100,包括吊装主梁110、张拉机构和两个挂钩机构。吊装主梁110可沿着左右方向相对于水平面倾斜设置,每一挂钩机构均连接于吊装主梁110下方且沿着左右方向相对间隔设置,至少一挂钩机构沿着左右方向相对于吊装主梁110可滑动设置。
43.请参照图13和图14,张拉机构设于吊装主梁110的上方,其包括一张拉主体151和自张拉主体沿着左右两侧向下延伸的第一张拉线152和第二张拉线153,第一张拉线152向左下延伸至连接吊装主梁110的左侧,第二张拉线153向右下延伸至吊装主梁110的右侧。吊装主梁110沿着左右方向倾斜设置时,张拉主体151张紧第一张拉线152和第二张拉线153。
44.本申请实施例中的吊具工装100中,张拉主体151悬吊于移送机构240的执行端,并能够倾斜转动。当张拉主体151张紧第一张拉线152和第二张拉线153时,吊装主梁110沿左右倾斜转动,使其中一个挂钩机构降至预设高度并钩挂住工件300的第一钩挂部310,将吊装主梁110下降放平,使另一个挂钩机构也降至预设高度。缩小两个挂钩机构的间距,两个挂钩机构相互靠近,使另一个挂钩机构钩挂住工件300的第二钩挂部320,起吊吊具工装100即可吊起工件300,以便下一步转运。
45.相对于现有的吊具工装,使用本申请实施例中的吊具工装100能够快速装卸预制构件,需要较少的工人辅助作业,不仅转运效率高,且操作简单方便,吊装平稳安全。
46.下述本申请实施例的吊具工装100的各部件的结构与相互连接关系。
47.请参照图1,吊装主梁110沿延伸,吊装主梁110的两端分别为主梁第一端111和主梁第二端112。
48.两个挂钩机构沿左右方向相对间隔布置,两个挂钩机构分别设置于吊装主梁110的两端,其中一个挂钩机构设置于主梁第一端111,另一个挂钩机构设置于主梁第二端112,两个挂钩机构构造成夹爪组件。
49.构成夹爪组件的两个挂钩机构中,至少一个挂钩机构可沿吊装主梁110的长度方向移动,使两个挂钩机构的间距可调节,以抓取或松开工件300。
50.请参照图1,作为一种示例形式,夹爪组件为单边活动夹爪组件130,单边活动夹爪组件130包括两个挂钩机构,分别为第一挂钩机构131和第二挂钩机构132。第一挂钩机构131固定于吊装主梁110的主梁第一端111,第二挂钩机构132布置于主梁第二端112,并与吊装主梁110的长度方向上的位置可调节。
51.该种形式的夹爪组件构造简单,易于操作,制造成本低廉,且第一挂钩机构131与吊装主梁110固定为一体,使吊具工装100能够吊运较大重量的工件300。
52.张拉机构设于吊装主梁110的上方,用于调整吊装主梁110沿左右方向倾斜的角度,并在第一钩挂部310和第二钩挂部320共同抓取工件300后张紧第一张拉线152和第二张拉线153,以便于起吊工件300。
53.请参照图13,作为张拉机构调整吊装主梁110左右倾斜的实现方式的示例,张拉主体151包括定滑轮,第一张拉线152和第二张拉线153相连且通过定滑轮悬吊,通过调整定滑轮的位置来改变第一张拉线152和第二张拉线153的相对长度比例,来实现吊装主梁110沿左右方向倾斜。例如,第一张拉线152的长度大于第二张拉线153的长度时,吊装主梁110的主梁第一端111高于主梁第二端112。
54.请参照图14,作为张拉机构张紧第一张拉线152和第二张拉线153的实现方式的示例,张拉主体151包括转轮机构,第一张拉线152和第二张拉线153的端部均缠绕于转轮机构,通过转轮机构转动,能够同时减小第一张拉线152和第二张拉线153的长度,进而张紧两个张拉线,利于进一步起吊工件300。
55.在本申请的一些实施例中,第一张拉线152包括位于第一轴线的靠近第一挂钩机构131一侧的多条链条,第二张拉线153包括位于第一轴线的靠近第二挂钩机构132一侧的多条链条,且多条链条在远离对应的挂钩机构的一端汇集成一条链条,以便与张拉主体151或者另一条张拉线相连。
56.例如,第一张拉线152包括第二链条1342和第三链条1343,第二链条1342和第三链条1343在远离第一挂钩机构131的一端汇集成一条链条,第二张拉线153包括第一链条1341,张拉主体151能够张紧第一张拉线152和第二张拉线153。
57.当吊装主梁110处于原始平衡状态时,第一张拉线(即第二链条1342和第三链条1343)和第二张拉线(即第一链条1341)的长度相等,定义其为原始长度;当吊装主梁110朝向左侧(沿第一方向绕第一轴线)倾斜时,第一张拉线152的长度相对原始长度增加,定义其为第一伸出长度,第二张拉线153的长度相对相对所述原始长度减小,定义其为第一缩减长度,张拉主体151张紧第一伸出长度的第一张拉线152以及张紧第一缩减长度的第二张拉线153;当吊装主梁110朝向右侧倾斜时,第一张拉线152的长度相对原始长度减小,定义其为第二缩减长度,第二张拉线153的长度相对于原始长度增加,定义其为第二增加长度。张拉主体151张紧第二缩减长度的第一张拉线152以及张紧第二增加长度的第二张拉线153,以便于下一步起吊所抓取的工件300。
58.通过第一张拉线152和第二张拉线153的长度增减,能够控制吊装主梁110绕第一轴线向左或向右倾斜,进而带动同侧的挂钩机构倾斜。
59.请参照图10,在本申请的一些实施例中,吊装主梁110朝向左侧倾斜至于第一安装位置时,处于第一安装位置时的左侧的第一挂钩机构131可连接工件300的第一钩挂部310;吊装主梁110朝向右侧倾斜至第二安装位置时,第二安装位置的右侧的第二挂钩机构132可
连接工件300的第二钩挂部320。
60.下面示例一种第一挂钩机构131的具体构造形式。
61.请参照图1和图2,第一挂钩机构131包括横梁1311和至少一个钩挂组件,横梁1311连接于吊装主梁110且与吊装主梁110垂直设置,钩挂组件沿横梁1311的长度方向位置可调节地安装于横梁1311。
62.对于第一挂钩机构131而言,横梁1311固定于吊梁第一端111。
63.在本申请的一些实施例中,横梁1311焊接于吊梁第一端111。
64.在其他实施例中,横梁1311也可以通过螺纹件安装于吊梁第一端111。
65.在本申请的一些实施例中,钩挂组件的数量为两个,两个钩挂组件分别为第一钩挂组件1312和第二钩挂组件1318,第一钩挂组件1312和第二钩挂组件1318分别布置于横梁1311的两端。
66.两个钩挂组件的构造相同,下面以第一钩挂组件1312为例,来示例性地阐述钩挂组件的具体构造形式。
67.请参照图3,在本申请的一些实施例中,第一钩挂组件1312包括导向框架1313、第二止动件1314和挂钩1315。导向框架1313沿横梁1311的长度方向与横梁1311滑动配合,挂钩1315固定于导向框架1313的下侧。导向框架1313上设有螺纹孔,第二止动件1314旋入导向框架1313的螺纹孔,并抵接于横梁1311的周向表面,以固定导向框架1313相对于横梁1311的位置。
68.该种形式的钩挂组件构造简单,成本低廉,且易于实现在横梁1311的长度方向上的位置的调节。
69.请参照图4和图5,第一钩挂组件1312与第一钩挂部310的第一子钩挂部311对应,第二钩挂组件1318与第一钩挂部310的第二子钩挂部312对应。
70.通过该种形式,能够根据具体的第一子钩挂部311和第二子钩挂部312的位置灵活调节第一钩挂组件1312和第二钩挂组件1318在横梁1311上的位置,使第一挂钩机构131准确钩入第一钩挂部310。
71.请参照图3,挂钩1315包括第一段1316和第二段1317,第一段1316竖直延伸,第一段1316的上端与导向框架1313相连,下端与第二端1317相连。
72.请参照图6,第二段1317与第一段1316之间的夹角α≤90
°
,以有效钩挂入对应的子钩挂部。
73.进一步地,α<90
°
,即第二段1317向上倾斜,挂钩1315为倒钩。
74.通过该种布置形式,能够有效防止在转运工件300的过程中工件300脱钩。
75.具体而言,当挂钩1315钩入第一子钩挂部311时,挂钩1315的第二段1317受工件300的重力g的作用承受摩擦力f和正压力f,当工件300位置固定时,在摩擦力f作用下,第一挂钩机构131的横梁1311倾向于向靠近第二挂钩机构132的方向滑动。也就是说,当挂钩为倒钩时,能够在吊运工件300的时候锁紧工件300,防止工件300从挂钩中脱落。工件300越重,驱使挂钩机构相互靠近的趋势就越大,进而防脱钩作用越明显。
76.在其他实施例中,第一钩挂组件1312也可以以其他的形式位置可调节地安装于横梁1311上或者直接固定于横梁1311,第一挂钩机构131所包括的钩挂组件的数量可根据第一钩挂部310所设置的具体子钩挂部的数量作出调整,使钩挂组件与子钩挂部一一对应。
77.同样的,第二挂钩机构132的两个钩挂组件分别与第二钩挂部320的第三子钩挂部321和第四子钩挂部322一一对应。
78.下面示例一种第二挂钩机构132的具体构造形式。
79.请参照图1,第二挂钩机构132的构造与第一挂钩机构131的构造基本相同,不同之处在于,第一挂钩机构131的横梁1311固定于主梁第一端111,第二挂钩机构132的横梁上设置有第一滑动框架1321,第一滑动框架1321滑动配合于主梁第二端112。
80.第二挂钩机构132沿吊装主梁110长度方向上的位置可调节。
81.在本申请的一些实施例中,第二挂钩机构132还包括第一止动件(图中没有示出),第一滑动框架1321设有第一螺纹孔1322。第一止动件螺纹旋入第一螺纹孔1322并抵接于吊装主梁110的周向表面,以固定第二挂钩机构的横梁与吊装主梁110的相对位置。
82.在本申请的一些实施例中,第二挂钩机构132的横梁上设有把手1324,把手1324位于第二挂钩机构132的横梁的外侧,以便于工人手持调节第二挂钩机构132在吊装主梁110上的位置。
83.在其他实施例中,也可以通过直线驱动机构来实现第二挂钩机构132的自动化调整和锁定。
84.进一步地,第一挂钩机构131的横梁1311与吊装主梁110共同构造成固定梁,固定梁用于悬吊于移送机构的执行端,以容许固定梁绕第一轴线转动。
85.请参照图1,在本申请的一些实施例中,单边活动夹爪组件130还包括第一吊耳组件133、第一链条组件134和悬吊块135,悬吊块135位于吊具工装100的重心线上。第一吊耳组件133包括第一吊耳1331、第二吊耳1332和第三吊耳1333,第一链条组件134包括第一链条1341、第二链条1342和第三链条1343,吊耳与链条一一对应。
86.其中,第一吊耳1331位于吊装主梁110的主梁第二端112,第二吊耳1332和第三吊耳1333分别布置于第一挂钩机构131的横梁1311在长度方向上的两端。
87.以第一吊耳1331与第一链条1341的配合为例,第一链条1341的一端与悬吊块135相连,另一端与第一吊耳1331相连。
88.通过该种形式,将固定梁悬吊于移送机构的执行端,不仅可靠稳定,且容许第二挂钩机构132自由移动。
89.在其他实施例中,第一吊耳组件133还包括第四吊耳1334和第五吊耳1335,第四吊耳1334和第五吊耳1335分别布置于第二挂钩机构132的横梁在长度方向上的两端,以作为备用吊耳。
90.在本申请的一些实施例中,第一钩挂组件1312的挂钩1315与第二钩挂组件1318的挂钩的朝向相同,第一挂钩机构131的挂钩与第二挂钩机构132的挂钩朝内相对设置,以共同抓取工件300。
91.在其他实施例中,第一挂钩机构131的挂钩与第二挂钩机构132的挂钩朝外相对设置,以通过两个挂钩机构相互远离的方式叉取工件300。
92.请参照图7和图8,作为另一种示例形式,夹爪组件为双边活动夹爪组件140,双边活动夹爪组件140包括第一挂钩机构141和第二挂钩机构142,第一挂钩机构141的横梁和第二挂钩机构142的横梁均可移动地连接于吊装主梁110。
93.该种形式的夹爪组件中,两个挂钩机构均可移动,可从工件300的两侧同时抓取或
松开工件300,使吊具工装100的竖向升降路径与抓取工件300后吊具工装100的中心线重合,缓解起吊过程中工件300的晃动,从而实现平稳起吊。
94.在本申请的一些实施例中,第一挂钩机构141和第二挂钩机构142的构造均与单边活动夹爪组件130中的第一挂钩机构131的构造类似,不同之处在于,第一挂钩机构141和第二挂钩机构142能够以自动化的形式相对于吊装主梁110移动。
95.以第一挂钩机构141为例,第一挂钩机构141包括直线驱动机构1411,安装于吊装主梁110的主梁第一端111,能够驱动第一挂钩机构141的横梁移动。
96.请参照图9,作为一种示例形式,直线驱动机构1411为电机丝杠螺母机构,包括电机1412、丝杠1413、螺母1414、连接架1415和两个轴承座1417。两个轴承座1417沿吊装主梁110的长度方向间隔布置,两个轴承座1417之间形成第一挂钩机构141的移动空间。丝杠1413沿吊装主梁110的长度方向延伸,两端转动支撑于两个轴承座1417。电机1412固定于吊装主梁110并驱动丝杠1413转动,螺母1414与丝杠1413螺纹配合,连接架1415将螺母1414与第一挂钩机构141的横梁相连为一体。在电机1412的驱动下,螺母1414带动第一挂钩机构141的横梁沿吊装主梁110的长度方向在移动空间范围内移动。
97.在其他实施例中,直线驱动机构1411也可以为直线气缸、电推杆、电机齿轮齿条组件或者带动力直线导轨。
98.进一步地,第一挂钩机构141的横梁与吊装主梁110的主梁第一端111通过导轨组件1416滑动配合,以稳定导向第一挂钩机构141的移动。
99.第二挂钩机构142的构造以及与吊装主梁110的配合形式与第一挂钩机构141相同,本文不再进一步赘述。
100.第一挂钩机构141的直线驱动机构1411和第二挂钩机构142的直线驱动机构的驱动方向相反设置,以使两个挂钩机构相互靠近或远离,实现双边活动夹爪组件140对工件300的抓取或松开。
101.在其他实施例中,第一挂钩机构141和第二挂钩机构142也可以采用和单边活动夹爪组件130的第二挂钩机构132中手动移动的方式实现与吊装主梁110的滑动配合。
102.对于双边活动夹爪组件140而言,吊装主梁110作为整个吊具工装100的固定梁,固定梁用于悬吊于移送机构的执行端,以容许固定梁绕第一轴线转动。
103.请参照图7,在本申请的一些实施例中,双边活动夹爪组件140包括第六吊耳143,第六吊耳143位于吊装主梁110在长度方向上的中部,用于悬吊于移送机构的执行端。
104.容易理解的,第一轴线与挂钩机构的横梁的长度方向平行。
105.在其他实施例中,为了实现固定梁绕第一轴线转动,吊装主梁110在长度方向上的中部也可以与移送机构的执行端绕第一轴线转动连接,以提高吊具工装100与移送机构执行端的相连可靠度。或者,固定梁也可以不局限于绕第一轴线转动,以灵活抓取工件300。
106.下面以本申请实施例中应用有单边活动夹爪组件130的吊具工装100为例,阐述一种工件吊装方法:
107.通过张拉主体张紧第一链条1341、第二链条1342和第三链条1343,使吊装主梁110处于原始平衡状态;
108.请参照图10,将第一链条1341增加第一伸出长度,将第二链条1342和第三链条1343缩减第一缩减长度,使吊装主梁110朝向左侧(沿第一方向)绕第一轴线倾斜至第一安
装位置,第一挂钩机构131降至预设高度,使第一挂钩机构131的第一钩挂组件1312的挂钩1315钩入工件300的第一子钩挂部311,第二钩挂组件的挂钩钩入第二子钩挂部312;
109.请参照图11,将第一链条1341缩减第二缩减长度,将第二链条1342和第三链条1343增加第二增加长度,使吊装主梁110朝向右侧倾斜至第二安装位置,使吊装主梁110放平,使第二挂钩机构132降至预设高度;
110.请参照图12,工人手持把手1324,将第二挂钩机构132的横梁向靠近第一挂钩机构131的横梁1311的方向推动,两个挂钩机构相互靠近,使第二挂钩机构132的两个挂钩分别钩入工件300的第二钩挂部320的第三子钩挂部321和第四子钩挂部322;
111.当四个挂钩分别钩入对应的子钩挂部后,吊具工装100已抓取住工件300,可起吊转运工件300。
112.当转运到位后需要松开工件300时,反向拉动把手1324,卸下工件300。
113.在本申请的一些实施例中,“使吊装主梁110能够沿第一方向绕第一轴线倾斜”步骤中,可手动按压第一挂钩机构131的横梁1311来实现,简单可靠,易于实现。
114.在其他实施例中,也可以设置自动化按压机构来实现上述步骤。
115.请参照图15,本申请实施例的一种工件生产线200,包括移送机构240和吊具工装100,吊具工装100悬吊于移送机构240的执行端。
116.工件生产线200使用了吊具工装100,能够快速装卸预制构件,需要较少的工人辅助作业,不仅转运效率高,且操作简单方便,吊装平稳安全。
117.在本申请的一些实施例中,工件生产线200用于生产钢筋混凝土预制构件,不仅适用于不同形状、规格的工件300,且符合钢筋混凝土工件300的生产线的生产节拍和效率,降低了人力成本。
118.在其他实施例中,工件生产线200也可以应用于其他需要对工件300流转的施工现场和现浇加工现场等等。
119.为了便于描述,工件生产线200的流转方向为x方向,与流转方向垂直的方向为y方向,竖直升降方向为z方向。
120.在本申请的一些实施例中,移送机构240包括第一直线导轨241、第二直线导轨242和悬吊机构243。第一直线导轨241沿x方向延伸,第二直线导轨242沿y方向延伸。第二直线导轨242位于第一直线导轨241的执行端,悬吊机构243位于第二直线导轨242的执行端。悬吊机构243的执行端悬吊有吊具工装100,以驱动吊具工装100沿z方向升降。
121.作为一种示例形式,悬吊机构243为电动葫芦,并具有张拉主体的功能。
122.在其他实施例中,移送机构240也可以为常见的三直线机械手,吊具工装100的悬吊块135悬吊于三直线机械手的执行端,张拉主体安装于悬吊块135。
123.在本申请的一些实施例中,工件生产线200还包括沿流转方向依次布置的缓存工位210、起吊工位220和模台工位230。
124.缓存工位210为工件300需要流转的第一工位,工件300通过rgv运至缓存工位210并堆叠缓存。堆叠起来的多个工件300进一步转运至起吊工位220,由移送机构240通过吊具工装100抓取工件300,起吊后并移送至模台工位230。
125.模台工位230有3个工位,分别用于放置三种同一户型、不同规格的工件300,进行捣制、蒸养等制作工序。
126.在本申请的一些实施例中,工件生产线200还包括工人位260和滚轮输送机构270。
127.工人位260位于起吊工位220,一个工人位于工人位260,通过按压第一挂钩机构131来使吊装主梁110能够沿第一方向绕第一轴线倾斜,以及在工件300摆放不平整的情况下手动辅助调整夹取位置。
128.相对于传统方式中,多个工人站立在工件300上来手动将每个挂钩钩入相应的子钩挂部的方式,工件生产线200使用吊具工装100,需要一个工人即实现上述操作,降低人力成本,实现安全生产。
129.滚轮输送机构270用于将堆叠起来的多个工件300从缓存工位210移送至起吊工位220,以提高转运效率。
130.在其他实施例中,也可以通过人力小推车来将多个工件300移送至起吊工位220。
131.可选地,工件生产线200还包括屏幕250和操作面板280。
132.屏幕250和操作面板280布置于工人位260,屏幕250能够显示生产线各数据、工件状态、产能信息、班组人员信息的屏幕,操作面板280用于供工人自动化操作移送机构240和吊具工装100的运行。工人位260上,工人可通过操作屏幕250看到mes系统中流转过来的工件300的信息,即使调整吊具工装的四个钩挂组件的位置,使其与子钩挂部一一对应;通过操作面板280控制起吊过程。
133.工件生产线200的工作过程如下:
134.工件300通过rgv运至缓存工位210并堆叠缓存;
135.滚轮输送机构270将堆叠的多个工件300移动至起吊工位220;
136.第一直线导轨241驱动第二直线导轨242到达x方向起吊点,第二直线导轨242带动悬吊机构243进一步沿y方向调节,以到达y方向起吊点,使悬吊机构243在xy方向上到达预设的起吊点;
137.悬吊机构243驱动吊具工装100沿z向下降至初始高度,工人结合手动与操作面板280的形式,使用吊具工装100抓取工件300后,再沿z向上升至转运高度;
138.移送机构240通过吊具工装100将工件300转运至模台工位230,并沿z向下降,将工件300放置到模台工位230上,再松开工件300,实现一个工件300的转运。
139.使用本申请实施例中的工件生产线200转运工件300,只需要“起吊
‑
转运
‑
松开”三步,实现快速装拆作业,且只需要一个工人站立于工人位260辅助作业,不仅便于操作,且吊装平稳、安全,降低了人力成本,提高了转运效率。
140.需要说明的是,在不冲突的情况下,本申请中的实施例中的特征可以相互结合。
141.以上所述仅为本申请的优选实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
完整全部详细技术资料下载
当前第1页 1 2 3
相关技术
- 一种多功能汽车液压支撑装置的...
- 一种新能源汽车更换电池用的顶...
- 柱塞及应用该柱塞的储料装置的...
- 集料机构及应用该集料机构的装...
- 定量取料机构及物料储存装置的...
- 真空保鲜机构及物料存储装置的...
- 全自动表面卷取机的制作方法
- 一种降低事故发生率的自动扶梯...
- 一种装配式建筑墙板用起吊机构...
- 机器人焊接用板型零件自动上料...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1